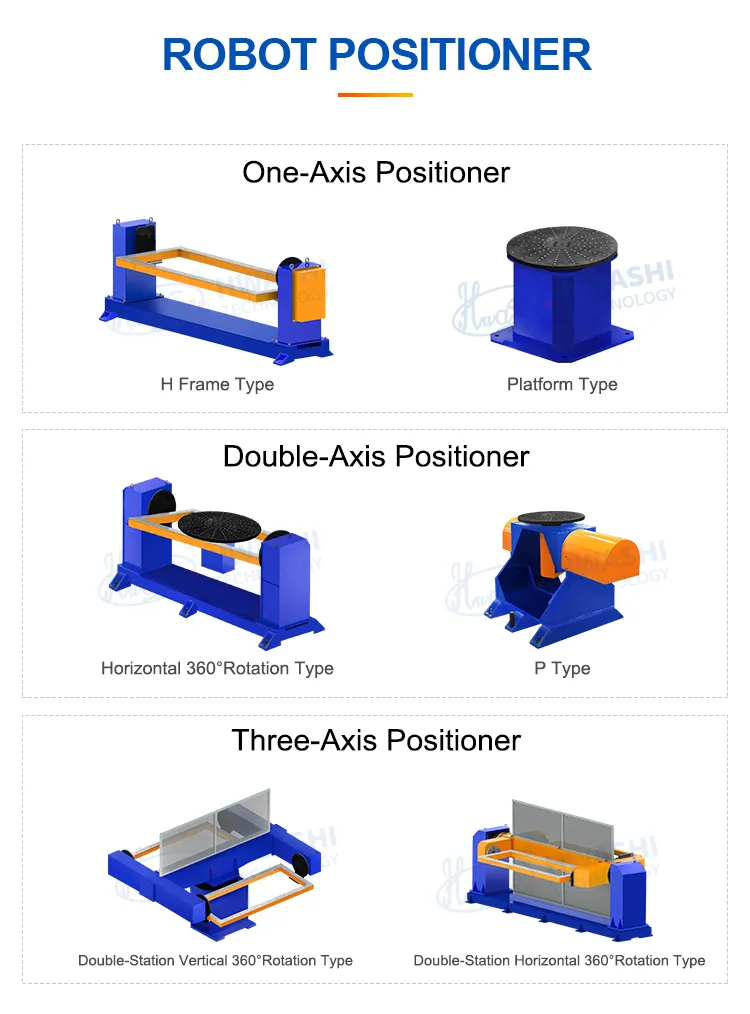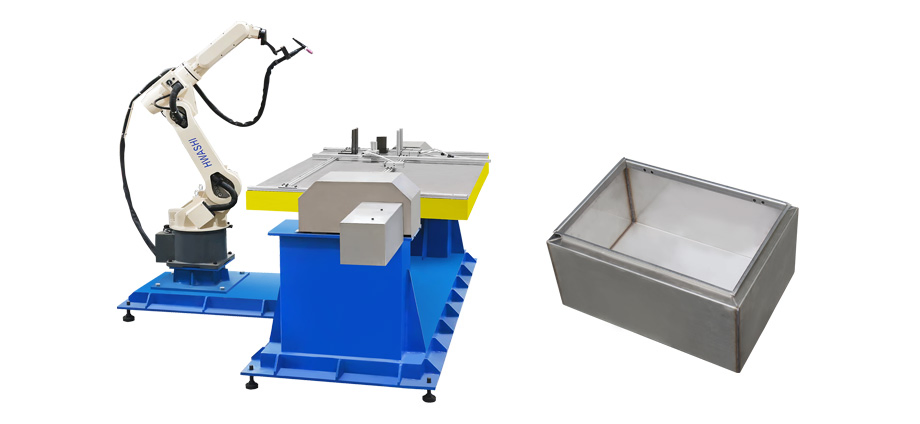
1完全な溶接ロボットシステムには,1セットのHS-R6-08 1.4m腕長ロボット,1セットの400A TIG溶接機,1セットの自動反衝突溶接銃,1軸垂直回転位置付け装置の2セット自動溶接は6軸ロボットMIG溶接機によって行われます.ロボットの自動溶接の位置付け要件を保証するためにレバー原則で製品の位置を固定するためにシリンダーまたは高速クランプを使用生産効率の要求に応じて,位置付け装置の2セットが設計されています.工品の積載と卸載のための1つもう"つは溶接用です
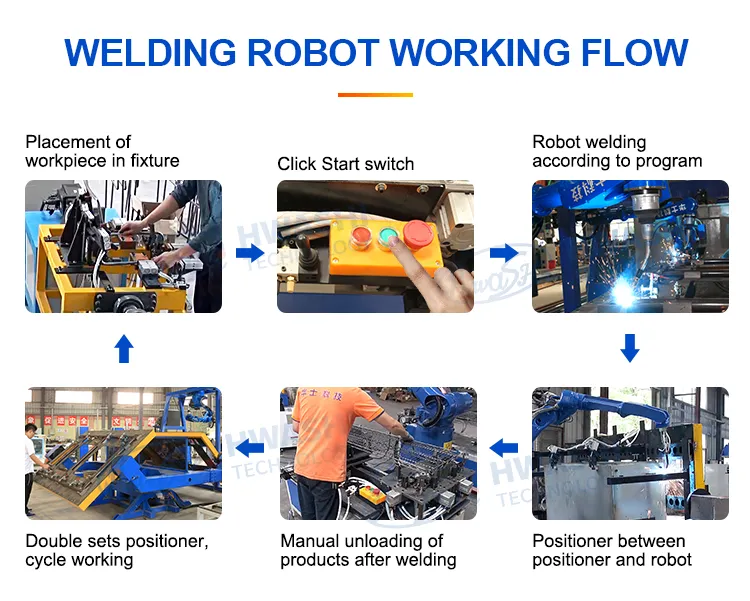
ワークフロー
1) 作業部件をステーション1の固定テーブルにある固定装置に手動で積み込む.
2) 溶接を開始する
3) ロボットと溶接機は,事前設定プログラムに従って作業部件を溶接する.
4) 溶接完了
5) ステーション1が溶接される間,ステーション2は荷重を積んで作業部位を同期固定しています. 2つのステーションは交替で作業しています.
6) サイクル作業
7) この機械は,手動で積載した材料で自動溶接を達成することができます. また,溶接品質と溶接効率を改善することができます. さらに,生産コストを削減することができます.純手動操作による品質不安定と低生産効率の問題が解決されました.
機械リスト
1位置付け装置,手動で読み込み
2製品を固定するシリンダー
3装置を回すシリンダー
4ロボット自動溶接
5製品を手動で卸す
6溶接銃のクリーナー装置
機械リスト
1位置付け装置,手動で読み込み
2製品を固定するシリンダー
3装置を回すシリンダー
4ロボット自動溶接
5製品を手動で卸す
6溶接銃のクリーナー装置