
起源の場所:
中国
ブランド名:
Hwashi
証明:
CE
私達に連絡しなさい
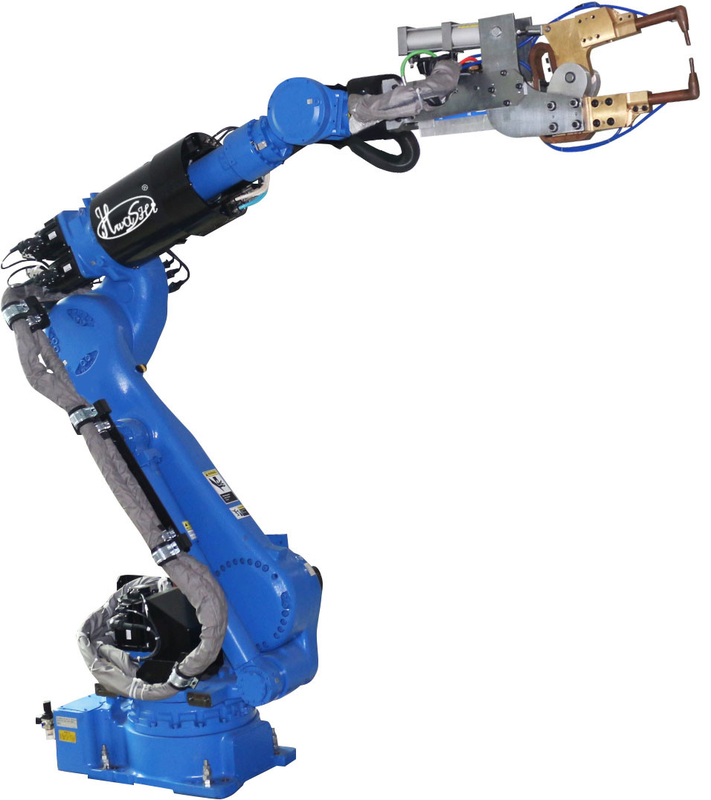

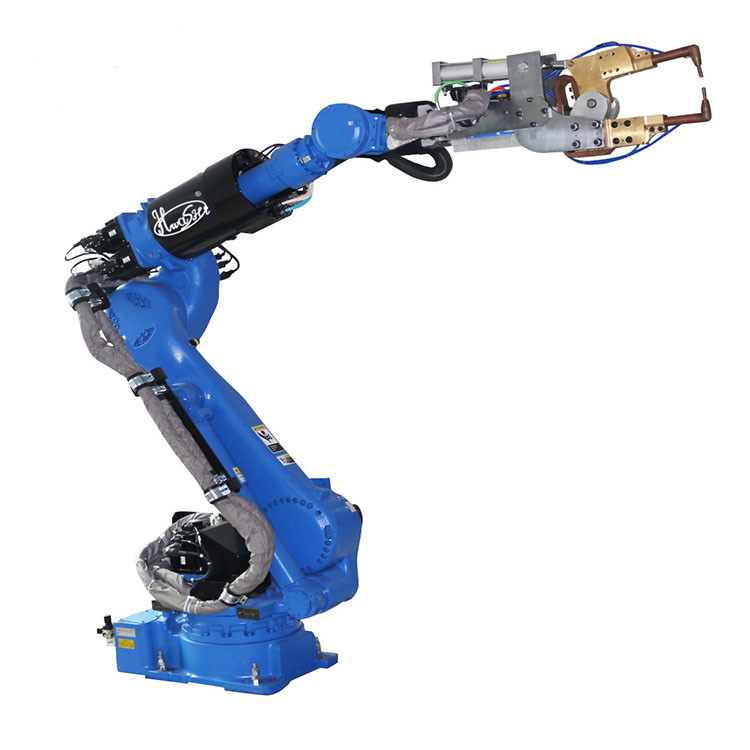
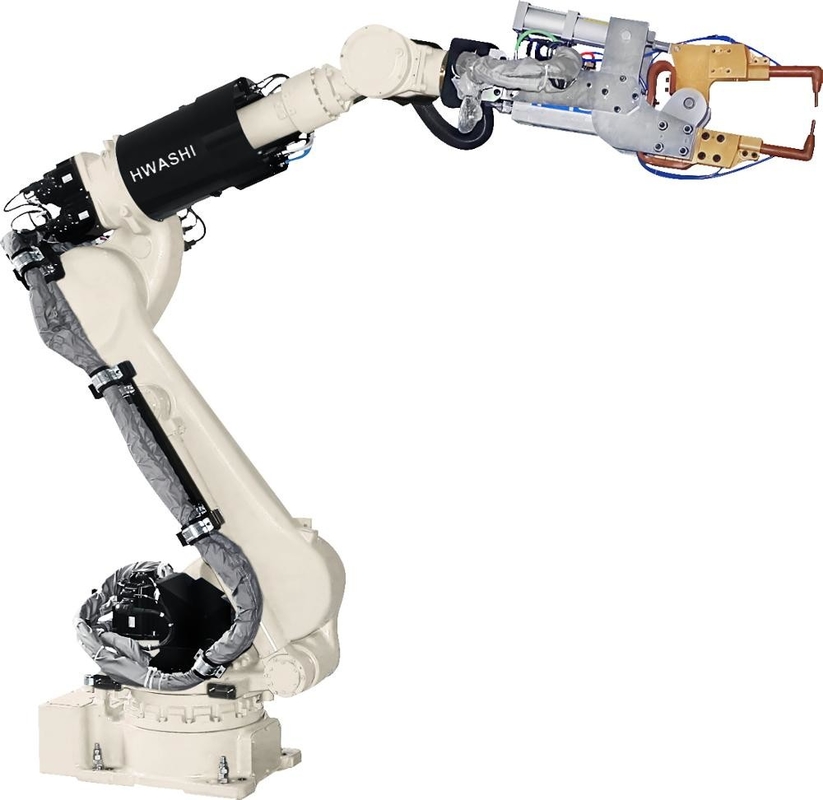
スポット溶接のロボットは165KG 6軸線のロボット ボディ、計算機制御システム、教授箱およびスポット溶接 システムで構成される。スポット溶接のロボットは溶接工の労働の強度人間手動welding.reducingを取り替えることができたり、また溶接の質を保障し、溶接の効率を改善できる。広く利用された
自動車産業、建設機械、柵の運輸力、IC装置、軍隊および他の企業


5つのロボット腕モデルのための指定:
| モデル | HS-R6-08 | HS-R6-10 | HS-R6-20 | HS-R6-50 | HS-R6-165 | |
| DOF | 6 | |||||
| モードの運転 | ACサーボ運転 | |||||
| 有効な負荷 | 8KG | 10KG | 20KG | 50KG | 165KG | |
| 繰り返し正確さ | ±0.05mm | |||||
| 働く半径 | 1400mm | 1589mm | 1595mm | 1950mm | 2483mm | |
| 重量 | 180KG | 180KG | 290KG | 600KG | 1300KG | |
| 動きの範囲(°) | J1 | ±170 | ±170 | ±170 | ±180 | ±180 |
| J2 | ±120~-85 | ±120~-80 | ±132~-95 | ±130~-90 | ±80~-60 | |
| J3 | ±85~-165 | ±85~-165 | ±73~-163 | ±75~-210 | ±80~-190 | |
| J4 | ±180 | ±180 | ±180 | ±360 | ±360 | |
| J5 | ±135 | ±135 | ±133 | ±115 | ±115 | |
| J6 | ±360 | ±360 | ±360 | ±360 | ±360 | |
| 最高速度(°/s) | J1 | 130 | 130 | 147 | 158 | 100 |
| J2 | 130 | 130 | 100 | 149 | 90 | |
| J3 | 130 | 130 | 135 | 130 | 104 | |
| J4 | 270 | 270 | 300 | 215 | 144 | |
| J5 | 170 | 170 | 198 | 251 | 160 | |
| J6 | 455 | 455 | 194 | 365 | 215 | |
| 力 | 4KVA | 4KVA | 6KVA | 14KVA | 31KVA | |
| 電圧 | 380Vか220V | |||||
| 頻度 | 50Hzか60Hz | |||||
溶接ロボットの記述。
1. 溶接されたプロダクトの要求に従って、私達は溶接を自動的に完了するためにtig/migの溶接工が装備されている6軸線フレームを使用してロボットを設計する。
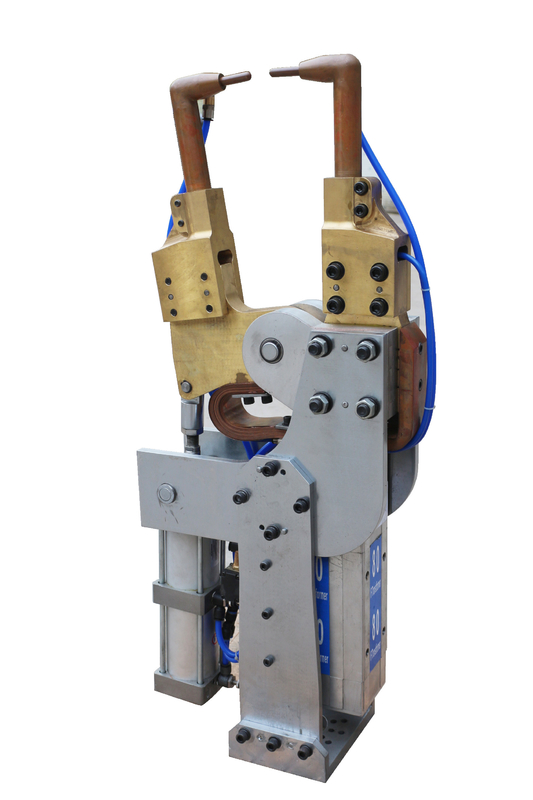
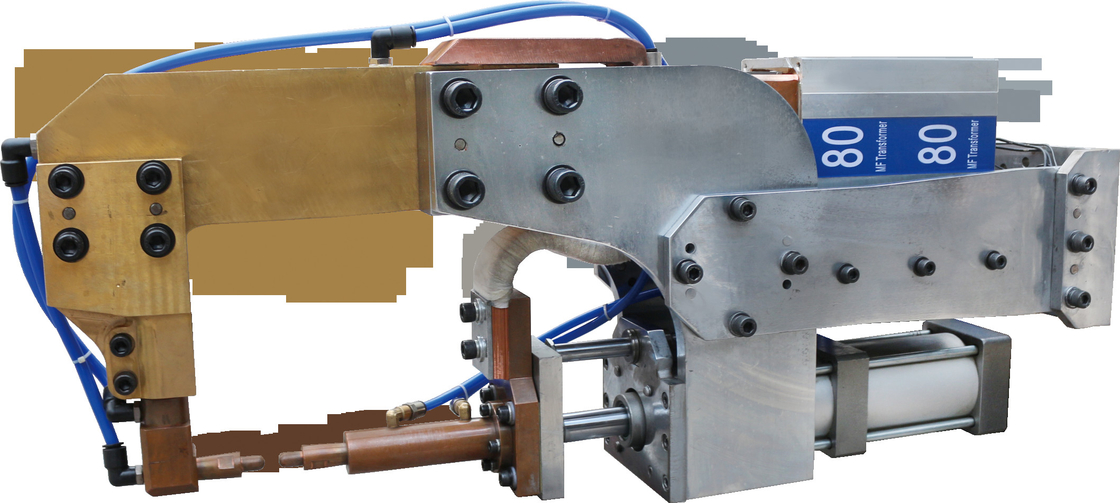
2. 溶接ロボットはシリンダーかクランプを使用し、プロダクトを修理するのにてこ比の主義を利用する。このように、自動溶接のための条件を満たし、ロボットを確かめることはプロダクトの各部分を溶接できる。
3.生産の効率の条件に従って、私達は2組の据え付け品を設計する。1つは溶接のために仕事の部分に荷を積むために、他使用される使用される。溶接の質を改善することおよび効率を溶接すること。
溶接ロボットのワークステーション及び据え付け品はあなたのプロダクトに従って設計することができる
明確なロボット腕のプログラミングのリモート。
完全な溶接ロボットはロボット腕、位置のchaning装置、コントローラー箱、プログラミング、ケーブル遠隔、等を含んでいる。
私達にあなたの照会を直接送りなさい


